6.1 p-groups, Nilpotent Groups, and Solvable Groups
Definition: A maximal subgroup of a group G is a proper subgroup M of G such that ∄H≤G with M<H<G. Theorem 1: Let p be prime and P have order pa,a>1. Then
Z(P)=1.
If H is a nontrivial normal subgroup of P then H∩Z(P)=1. In particular, every normal subgroup of order p is contained in Z(P).
If H⊴P then ∃F≤H with ∣F∣=pb and F⊴P, ∀pb that divide ∣H∣. In particular, P has a normal subgroup of order pb for every b∈{0,…,a}.
If H<P then H<NP(H).
Every maximal subgroup of P is of index p and is normal in P.
Definition:
Z0(G)=1,Z1(G)=Z(G),Zi+1(G)/Zi(G)=Z(G/Zi(G)). The chain Z0(G)≤Z1(G)≤Z2(G)≤… is the upper central series of G.
G is nilpotent if Zc(G)=G for some c∈Z. The smallest such c is the nilpotence class of G.
Proposition 2: Let p be a prime and P be a group of order pa. Then P is nilpotent of nilpotence class at most a−1 for a≥2 (and class = a when a=0,1). Theorem 3: Let G be a finite group, let p1,…,ps be the distinct primes dividing ∣G∣ and let Pi∈Sylpi(G), 1≤i≤s. Then the following are equivalent:
G is nilpotent.
If H<G then H<NG(H).
Pi⊴G for 1≤i≤s.
G≅P1×⋯×Ps.
Corollary 4: A finite abelian group is the direct product of its Sylow subgroups. Proposition 5: If G is a finite group such that for all n∈Z+ with n∣∣G∣, G contains at most n elements x satisfying xn=1, then G is cyclic. Proposition 6: (Frattini's Argument) Let G be a finite group, H⊴G, and P∈Sylp(H). Then G=HNG(P) and ∣G:H∣ divides ∣NG(P)∣. Proposition 7: A finite group is nilpotent ⟺ every maximal subgroup is normal. Definition: For any (finite or infinite) group G we define G0=G,G1=[G,G],Gi+1=[G,Gi]. The chain of groups G0≥G1≥G2≥… is called the lower central series of G. Theorem 8: A group G is nilpotent ⟺Gn=1 for some n≥0. In fact, G is nilpotent of class c⟺c is the smallest nonnegative integer such that Gc=1. Also, then Gc−i≤Zi(G), froalli∈{0,..,c}. Definition: For any group G we define G(0)=G,G(1)=[G,G],G(i+1)=[G(i),G(i)]. The chain of groups G(0)≥G(1)≥… is the derived or commutator series of G. Definition: A group G is solvable if there exists a chain of subgroups 1=G0⊴G1⊴⋯⊴Gs=G such that Gi+1/Gi is abelian ∀i∈{0,1,…,s−1}. Theorem (3.4): A finite group G is solvable ⟺∀n with n∣∣G∣ and (n,n∣G∣)=1, G has a subgroup of order n. Theorem 9: A group G is solvable ⟺G(n)=1 for some n≥0. Definition: If G is solvable, the smallest nonnegative n such that G(n)=1 is the solvable length of G. Proposition 10: Let G,K be groups, H≤G, and φ:G→K be a surjective homomorphism. Then
H(i)≤G(i),∀i≥0. In particular, if G is solvable, so too is H, and the solvable length of H is ≤ the solvable length of G.
φ(G(i))=K(i). In particular, homomorphic images and quotient groups of solvable groups are solvable, with solvable length less than or equal to that of the domain group G.
If N⊴G and both N and G/N are solvable, then so is G.
Theorem 11: Let G be a finite group.
(Burnside) If ∣G∣=paqb for some primes p,q, then G is solvable.
(Philip Hall) If ∀p with p∣∣G∣, we factor ∣G∣=pam with (p,m)=1, and G has a subgroup of order m, then G is solvable. (i.e. ∀p, G has a subgroup with index equal to the order of a Sylow p-subgroup, called a Sylow p-complement, then G is solvable).
(Feit-Thompson) If ∣G∣ is odd then G is solvable.
(Thompson) If ∀ pairs of elements x,y∈G, ⟨x,y⟩ is solvable, then G is solvable.
6.2 Applications in Groups of Medium Order
Technique 1: (Counting Elements) Consider Sylow p-subgroups where p∣∣G∣ and p2∤∣G∣. Non-normality implies np>1,∀p. Calculate # of elements of prime order from this, show that it is >G⟹ not simple. Or, show that np=1 for some p. Technique 2: (Exploiting subgroups of small index) This is derived from the fact that if H≤G and ∣G:H∣=k, ∃φ:G→Sk with kerφ≤H. If G is simple, k=1⟹G≅F≤Sk⟹∣G∣∣k! (that is, φ must be an injective homomorphism since kerφ⊴G and we assume G is simple). ∣G∣=p1α1…psαs with p1<⋯<ps. Minimal possible index of a proper subgroup is (usually) dependent on αs. αs=1⟹≥ps, αs=2⟹≥2ps. Technique 3: (Permutation Representations) Consider a proper subgroup of index k in G with ∣G∣=n. Then, G≅F≤Sk. We then calculate within Sk that Sk contains no simple subgroup of order n. Two helpful restrictions are
if G contains an element/subgroup of a particular order, so too must Sk
if P∈Sylp(G) and P∈Sylp(Sk), then ∣NG(P)∣∣∣NSk(P)∣. Note that (2) occurs frequently when k=p or p+1 and G has a subgroup of index k, as it implies ∣NSk(P)∣=p(p−1)⟹∣NG(P)∣∣p(p−1). It may also help to work in Ak instead of Sk (see Prop 12).
Technique 4: (Playing p-subgroups off against each other for distinct primes p)
Suppose p,q are distinct primes such that every group of order pq is cyclic ⟹p∤q−1 with p<q. If Q∈Sylq(G) with ∣Q∣=q and p∣∣NG(Q)∣, ∃P≤NG(Q) with ∣P∣=p. Thus, PQ is a group, and if PQ is abelian, PQ≤NG(P) and thus q∣∣NG(P)∣. This may force NG(P)=G⟹P⊴G or at least force NG(P) to have index less than the minimal index ⟹ contradiction.
We can refine this method. Let Q∈Sylq(G) and p∣∣NG(Q)∣. Let P∈Sylp(NG(Q)). Apply Sylow's Theorem, and if P⊴NG(Q), we force NG(P) to have small index. If P∈Sylp(G), we can put further restrictions on ∣NG(P)∣. If not, then Sylow's Theorem implies P<P∗∈Sylp(G)⟹P<NP∗(P)≤NG(P).
Technique 5: (Studying normalizers of intersections of Sylow p-subgroups) Technique 1 fails to generalize because if distinct P,R∈Sylp(G) and ∣P∣=pα,α≥2, it is not necessary for P∩R=1. Suppose ∃P,R with the above true. Let P0=P∩R. Then, P0<P and P0<R. By Theorem 1, P0<NP(P0) and P0<NR(P0). We aim to use this to prove that the normalizer in G has smaller index than the minimal index. This works well when ∣P0∣=pα−1, as then NG(P0) has two distinct Sylow p-subgroups P,R since P0 is a maximal subgroup of P,R. In particular, ∣NG(P0)∣=pαk where k≥p+1. Proposition 12:
If G has no subgroup of index 2 and G≤Sk, then G≤Ak.
If P∈Sylp(Sk) for some odd prime p, then P∈Sylp(Ak) and ∣NAk(P)∣=21∣NSk(P)∣.
Lemma 13: In a finite group G, if np≡1(modp2), then ∃P,R∈Sylp(G) with P=R and P∩R is of index p in both P,R (and thus normal in each). Proposition 14: If G is a simple group of order 168, then
n2=21,n3=7,n7=8.
Sylow 2-subgroups of G are dihedral, Sylow 3- and 7-subgroups are cyclic.
G is isomorphic to a subgroup of A7 and G has no subgroup of index ≤6.
The conjugacy classes of G are the identity, two classes with order 24 and elements of order 7 (represented by an order 7 element and its inverse), one class with order 56 and elements of order 3, one class of order 42 and elements of order 4, and one class of order 21 and elements of order 2 (in particular, every element of G has order a power of a prime).
If T∈Syl2(G) and U,W are the two Klein 4-groups in T, then U,W are not conjugate in G and NG(U)≅NG(W)≅S4.
G has precisely three conjugacy classes of maximal subgroups, two ≅S4 and one ≅ non-abelian group of order 21.
Theorem 15: Up to isomorphism there is a unique simple group of order 168, GL3(F2)≅ automorphism group of the projective plane F.
6.3 A Word on Free Groups
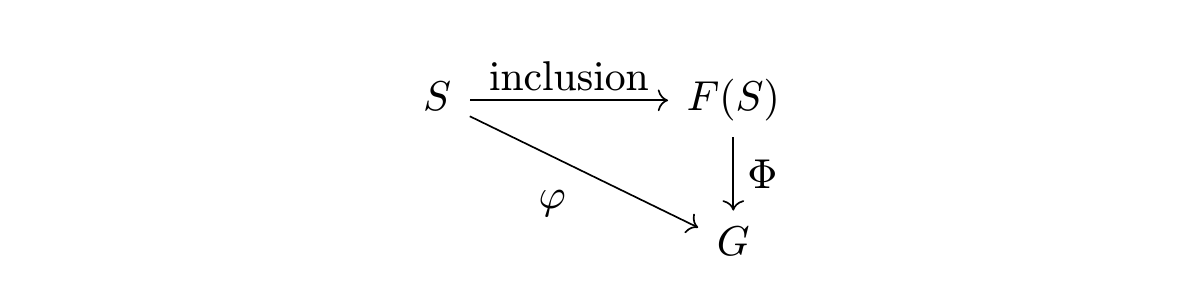
Theorem 16:F(S) is a group under the binary operation defined as follows:
Where k is the smallest integer in the range 1≤k≤m+1 such that skϵk=rm−k+1−δm−k+1. (Where the product of r and s in the center does not cancel). Theorem 17: Let G be a group, S a set, and φ:S→G a set map. Then there is a unique group homomorphism Φ:F(S)→G such that the following diagram commutes: Corollary 18:F(S) is unique up to a unique isomorphism which is the identity map on the set S. Definition: The group F(S) is called the free group on the set S. A group F is a free group if there is some S such that F=F(S) — in this case we call S a set of free generators (or a free basis) of F. The cardinality of S is the rank of the free group. Theorem 19: (Schreier) Subgroups of a free group are free. Definition: Let S⊆G such that G=⟨S⟩.
A presentation for G is a pair ⟨S,R⟩, where R is a set of words in F(S) such that the normal closure of ⟨R⟩ in F(S) (the smallest normal subgroup containing ⟨R⟩) equals the kerπ, where π:F(S)→G is a homomorphism that extends the identity mapping from S to S. The elements of S are called generators and those of R are called relations.
We say G is finitely generated if there is a presentation (S,R) such that S is a finite sets and we say G is finitely presented if there is a presentation (S,R) with both S and R finite sets.
 Corollary 18: is unique up to a unique isomorphism which is the identity map on the set .
Corollary 18: is unique up to a unique isomorphism which is the identity map on the set .