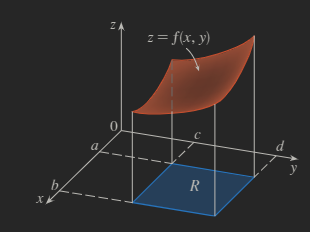
Consider a function f of two variables bounded by a closed rectangle R, i.e. bounded by a≤x≤b and c≤y≤d, for some a,b,c,d∈R. Then, define the 3D solid S such that it lies between the rectangle R lying in the xy-plane and the surface with equation z=f(x,y), bounded by the above bounds. The below image may help you understand this:
We aim to find the volume of S.
Consider dividing rectangle R into subrectangles, analogous to how we might do a Riemann sum, but instead in 3 dimensions. For any subrectangle, we can approximate the volume of S lying above the subrectangle by computing f(x0,y0)ΔA, where x0,y0 represents an arbitrary point in the subrectangle and ΔA represents the area of the subrectangle.
Approximating the volume mathematically, we get
V≈i=1∑mj=1∑nf(xi,yj)ΔAi,j
Where m,n denote the number of subdivisions in each dimension (x-axis and y-axis).
To find the true volume, we of course just take the limit:
Essentially, we can integrate independently of the other integrals. Note also that partial integration works analogously as to partial differentiation, i.e. you treat other variables as constant.
Additionally, note that many functions f can be integrated in either order when finding the volume of the solid S.
Fubini's Theorem
If f is continuous over the rectangle R={(x,y)∣a≤x≤b,c≤y≤d}
R∬f(x,y)dA=∫cd∫abf(x,y)dxdy=∫ab∫cdf(x,y)dydx
Exception: Product of Univariate Functions
In the special case where f(x,y)=g(x)h(y), i.e. can be factored as a product of a function of only x and a function of only y, then we can write
R∬f(x,y)dA=R∬g(x)h(y)dA=∫abg(x)dx∫cdh(y)dy
We can do this because y is constant when integrating with respect to x, and vice versa.
Average Value
This is calculated analogously to how it is in 1 dimension. Simply,
favg=A(R)1R∬f(x,y)dA
Where A(R) is the area of the rectangle R. This should make sense intuitively.
15.2 Double Integrals over General Regions
We aim to integrate volumes of solids over arbitrary plane regions, not just rectangles. We will consider two types of regions, and their corresponding integrations.
In order to evaluate ∬Df(x,y)dA, we consider a rectangle R=[a,b]×[c,d] that contains the plane region D, i.e. D⊆R. We define a function F with domain R as
F(x,y)={f(x,y)0if (x,y) is in Dif (x,y) is in R but not in D
Then, if F is integrable over R, we have
D∬f(x,y)dA=R∬F(x,y)dA
Type I
A plane region D is said to be of type I if it lies between the graphs of two continuous functions of x, that is:
(4)D1∩D2 can contain boundary points, but only that.
(5)A(D) is the area of the region D.
15.3 Double Integrals in Polar Coordinates
The proof of the formula for this will be left as an exercise to the reader since it is similar to the proof of double integrals over rectangles. Hint: consider dividing a polar region into polar subrectangles.
Double Integral over Polar Rectangle
If f is continuous on a polar rectangle R describe by 0≤a≤r≤b, α≤0≤β, where 0≤β−α≤2π, then
R∬f(x,y)dA=∫αβ∫abf(rcosθ,rsinθ)⋅rdrdθ
Note the additional factor of r on the RHS. Careful not to forget this!
Generalizing to any polar region, similarly to how it was done in 15.2, we get
Let ρ(x,y) denote the density function of a region D. Thus,
ρ(x,y)=limΔAΔm
Where Δm,ΔA are the mass and area of an infinitesimal rectangle containing (x,y). Thus, it naturally follows that
m=D∬ρ(x,y)dA
Physicists consider other types of density that aren't mass as well. For instance, if the charge density if given by σ(x,y) at (x,y) in D, then the total charge Q is simply
Q=D∬σ(x,y)dA
Moments and Centers of Mass
The moment of a particle is the product of its mass and its directed distance from the axis. Consider an infinitesimal rectangle Rxy containing the point (x,y). Then, the mass of Rxy≈ρ(x,y)ΔA, and the moment of Rxy with respect to the x-axis is therefore
Mx(Rxy)=ρ(x,y)ΔA⋅yxy
Taking the limit of the sum of these quantities gives us the moment of the entire lamina about the x-axis:
Mx=D∬yρ(x,y)dA
And about the y-axis,
My=D∬xρ(x,y)dA
Using these, we derive the coordinates (x,y) of the center of mass of a lamina occupying the region D:
x=mMy=m1D∬xρ(x,y)dAy=mMx=m1D∬yρ(x,y)dA
Where the mass m is given by
m=D∬ρ(x,y)dA
Moment of Inertia
The moment of inertia, or second moment, of a particle of mass m about an axis is defined to be mr2, where r is the distance from the particle to the axis. For a lamina with density function ρ(x,y) and occupying a region D, we can similarly derive equations for this.
IxIy=D∬y2ρ(x,y)dA=D∬x2ρ(x,y)dA
The moment of inertia about the origin, or the polar moment of inertia, is meanwhile
I0=D∬(x2+y2)ρ(x,y)dA=Ix+Iy
Moreover, we may define the radius of gyration of a lamina about an axis is the number R such that
mR2=I
In particular, we may define
my2=Ixmx2=Iy
Probability
The probability density function (PDF)f of a continuous random variable X has the property that f(x)≥0,∀x, and ∫−∞∞f(x)dx=1. Additionally,
P(a≤X≤b)=∫abf(x)dx
Now, consider a pair of continuous random variables X,Y. The joint density function of X,Y is a function f of two variables such that the probability that (X,Y) lies in a region D is
P((X,Y)∈D)=D∬f(x,y)dA
Note also that
R2∬f(x,y)dA=∫−∞∞∫−∞∞f(x,y)dxdy=1
Expected Values
If X is a random variable with PDF f, then its mean is
μ=∫−∞∞xf(x)dx
If X,Y are random variables with joint density function f, we define the X-mean and Y-mean, i.e. the expected values of X,Y, to be
μ1=R2∬xf(x,y)dAμ2=R2∬yf(x,y)dA
15.5 Surface Area
Consider a point Pxy=(xi,yj,f(xi,yj)) on some surface S described by z=f(x,y). Now, consider some infinitesimal rectangle Rij lying in the xy-plane that contains the projection of Pij down into the xy-plane. Then, we may approximate the surface area of the curve lying above this rectangle Rij with the area of the parallelogram of the tangent plane Tij at point Pij bounded by the bounds of Rij (in x and y). We will let one vertex of this parallelogram lie at point Pij (i.e. Pij lies directly above a vertex of Rij). Let this area be denoted by ΔTij. Then, we may approximate the surface area of S as
A(S)=m,n→∞limi=1∑mj=1∑nΔTij
Now, we aim to find an expression for ΔTij. Since it is the area of some parallelogram in Tij, we can let a,b be vectors that lie along the sides of this parallelogram. Additionally, let Δx and Δy be the (infinitesimal) side lengths of the rectangle Rij. Then, we may define
ab=Δxi+fx(xi,yj)Δxk=Δyj+fy(xi,yj)Δyk
Note that we are enabled to do this because we can just let the sides of the rectangle Rij be parallel to the x and y axes, and therefore one side of the parallelogram will have no component in the x direction, and similarly the other side will have no component in the y direction.
Since the area of the parallelogram with respect to a,b is ∣a×b∣, we may write that
Note that the similarity between the surface area formula and the arc length formula may help with remembering this:
L=∫ab1+(dxdy)2dx
15.6 Triple Integrals
First, let's consider the triple integral of a function f defined on a rectangular box
B={(x,y,z)∣a≤x≤b,c≤x≤d,e≤z≤f}
Similar to previous sections, we consider dividing B into infinitesimal sub-boxes and then finding the value of the triple integral by summing over the boxes' volumes.
Just like double integrals, we can express this in the form of iterated integrals
Fubini's Theorem for Triple Integrals
If f is continuous on the rectangular box B=[a,b]×[c,d]×[e,f], then
R∭f(x,y,z)dV=∫ef∫cd∫abf(x,y,z)dxdydz
We may similarly extend this to a triple integral of a functionf over a general bounded region E in 3d space (i.e. a solid), nearly identically to how it is done in 2d. The derivation is left as an exercise to the reader.
This can similarly be extended to work for y or z as the outermost integral.
Note that the problem may sometimes be made easier by first focusing on reducing the problem to 2d, typically by projecting the solid to the xy, yz, or xz plane, depending on the solid type.
For instance, a type 2 region E (as it is termed in the textbook) is defined by
E={(x,y,z)∣(y,z)∈D,g1(y,z)≤x≤g2(y,z)}
Where D is the projection of E onto the yz plane. Then,
E∭f(x,y,z)dV=D∬[∫g1(x,y)g2(x,y)f(x,y,z)dx]dA
This can be extended to work for projections onto the xy and xz planes (type 1 and 3, respectively).
We can modify the applications discussed in [[#15.4 Applications of Double Integrals|15.4]] for triple integrals.
Now, with rectangular coordinates, we began by integrating rectangular prisms for triple integrals. In spherical coordinates, we may consider instead a spherical wedgeE defined by
E={(ρ,θ,ϕ)∣a≤p≤b,α≤θ≤β,c≤ϕ≤d}
The derivation will not be covered in detail here, since it is mostly similar to other derivations we have done. Review the textbook if you are interested.
The formula can be extended to include more general spherical regions with
E={(ρ,θ,ϕ)∣α≤θ≤β,c≤ϕ≤d,g1(θ,ϕ)≤ρ≤g2(θ,ϕ)}
15.9 Change of Variables in Multiple Integrals
In other words, u-substitution for multivariate integrals. Consider the change of variables given by a transformationT from the uv-plane to the xy-plane
T(u,v)=(x,y)
Where x,y are described by
x=g(u,v)y=h(u,v)
It is also sometimes denoted
x=x(u,v)y=y(u,v)
It is typically assumed that T is a C1transformation, which means that g and h have continuous first-order partial derivatives.
This transformation T is defined as a function whose domain and range are subsets of R2.
If T(u,v)=(x,y), the point (x,y) is the image of (u,v) for T.
If T(u1,v1)=T(u2,v2)⟹(u1,v1)=(u2,v2), i.e. not two points have the same image, T is injective.
If T is injective, ∃T−1, the unique inverse transformation from the xy-plane to the uv-plane.
The equations describing the relationship of x,y with u,v can typically be solved in terms of the set of variables describing the image to produce the image under transformation T.
Consider a rectangle S in the uv-plane whose lower left corner is (u0,v0) and has dimensions Δu and Δv. Consider that the image of S under transformation T of the region R can be described by the vector
r(u,v)=g(u,v)i+h(u,v)j
As u,v range over the specified domain. Consider that
ru=gu(u0,v0)i+hu(u0,v0)j=∂u∂xi+∂u∂yj
And
rv=gv(u0,v0)i+hv(u0,v0)j=∂v∂xi+∂v∂yj
These are the tangent vectors at (x0,y0) to the image curve in the xy-plane. The image region R=T(S) can thus be approximated by a parallelogram whose sides are determined by the secant vectors
Thus, we come to the topic at hand: changing variables of a double integral.
Change of Variables in a Double Integral
Suppose that T is a C1 transformation whose Jacobian is nonzero that T maps a region S in the uv-plane onto a region R in the xy-plane. Suppose that f is continuous on R and that R and S are type I or type II plane regions. Suppose also that T is injective, except perhaps on the boundary of S. Then
As an exercise, consider the transformation T that maps from polar coordinates to rectangle coordinates, i.e. x=g(r,θ)=rcosθ and y=h(r,θ)=rsinθ. Show that we derive the same formula for double integration over polar coordinates.
What about triple integrals? We can define the Jacobian of T in 3 dimensions similarly.
The formula for changing variables for triple integrals follows similarly. As an exercise, verify this for triple integrals in spherical or cylindrical coordinates.